07. ROS Services
ROS Services
Now that you've written your first ROS node, you've seen how publishing to a topic works, and you were able to control the robotic arm by publishing to the
/simple_arm/joint_1_position_controller/command
topic and
/simple_arm/joint_2_position_controller/command
topic. Next, we'll see another node called
arm_mover
, which implements the
safe_move
service to allow service calls to control the arm.
Defining services
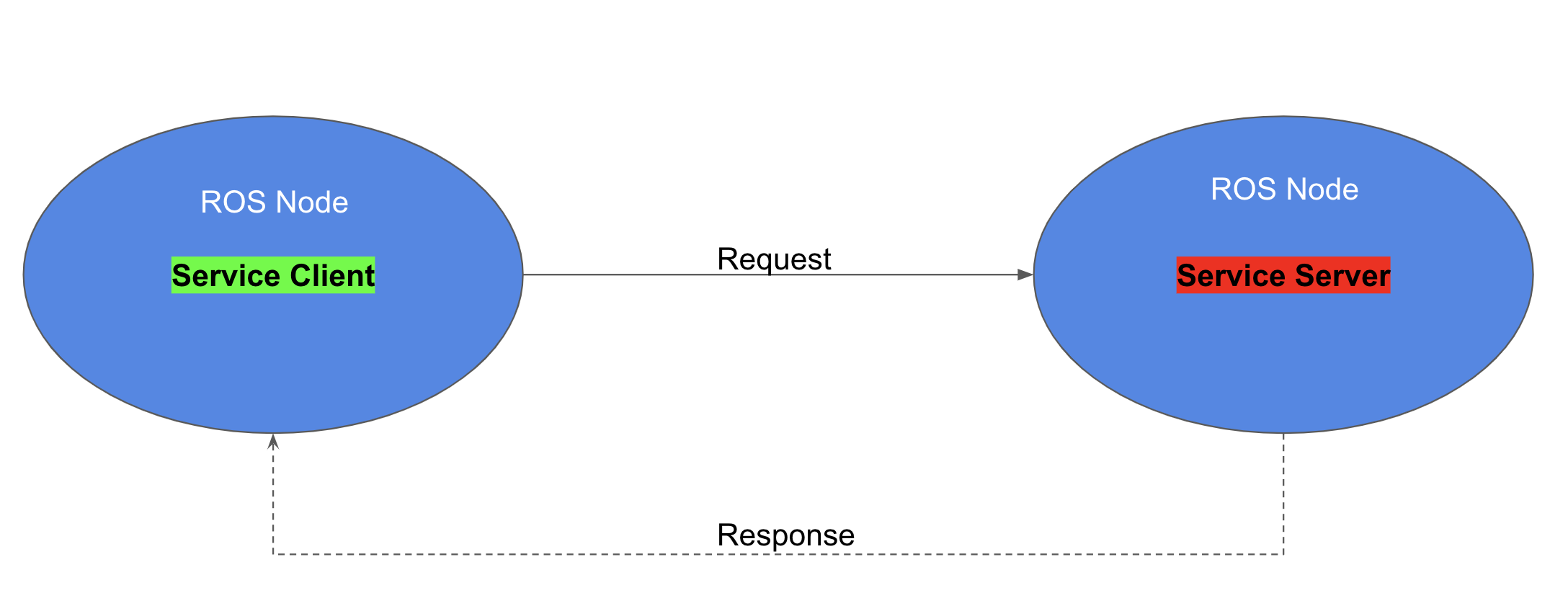
A ROS service allows request/response communication to exist between nodes. Within the node providing the service, request messages are handled by functions or methods. Once the requests have been handled successfully, the node providing the service sends a message back to the requester node. In C++, a ROS service server can be created using the following definition format:
ros::ServiceServer service = n.advertiseService(`service_name`, handler);
In ROS, the service class name
ServiceServer
comes from the file name where the service definition exists. Each service provides a definition in a
.srv
file; this is a text file that provides the proper message type for both requests and responses.
The
advertiseService()
allows you to communicate with ROS through the node handle
n
and inform ROS that you want to create a service.
The
service_name
is the name given to the service. Other nodes will use this name to specify the service to which they are sending requests.
The
handler
is the name of the function or method that handles the incoming service message. This function is called each time the service is called, and the message from the service call is passed to the
handler
function as an argument. The
handler
should return an appropriate service response message.
Using Services
Command Line
Services can be called directly from the command line, with:
$ rosservice call service_name “request”After calling the service, you will wait for an answer.
ROS Service Client
Another approach is to use a ROS service programmatically, from within a node. You will define a
ROS client
, which provides the interface for sending messages to the service:
ros::ServiceClient client = n.serviceClient<package_name::service_file_name>("service_name");
One way the
ROS Client
can then be used is to send requests is as follows:
client.call(srv); // request a service
For now, we’ll focus on how to create the ROS
service server
. Later, in the
look_away
node, you will practice calling the service from a
service client
node.
See the ROS documentation on services for detailed instructions on how to create and call ROS services.
ROS Services
SOLUTION:
- A node for a lunar rover that shuts down a robotic arm by folding the arm and killing all related processes.
- A node that sets a given parameter on request. For example, a node in turtlesim that sets the pen color in the turtlesim window.
- A node which executes movement for a robotic arm, checking that the arm joints are within specified bounds.
Let's get started with the
arm_mover
code, so you can see how to combine the
safe_move
service along with publishers in a node so that whenever a service is requested, it will be responsible to publish messages on a topic.